



Tuning ultrasonic driver
Video Link...
http://www.youtube.com/watch?feature=player_embedded&v=PwT69o41gm0
Ultrasonic cavitation in water
Video Link...
http://www.youtube.com/watch?feature=player_embedded&v=OraziV7kkAU
Power ultrasonic driver (14/05/11)
Page last updated: 19/01/2012, 02:58:22 PM GMTAll content © Lindsay R. Wilson 2010 lindsay@imajeenyus.com
For trouble-free viewing, please ensure you are using the UTF-8 character encoding.
Introduction
On this page, I describe the construction of a power supply for a 70W ultrasonic tank transducer, and the machining & tuning of an aluminium horn. I originally started all this in order to do ultrasonic drilling, but could find no simple, cheap means of driving high-power transducers. "Proper" ultrasonic horns are usually made from titanium, and the power sources are usually fancy affairs with auto frequency tuning. However, I found that, for the power levels I'm interested in, an aluminium horn works perfectly well, and it is possible to drive the transducer with a manually-controlled oscillator and inverter. I won't go into too much detail on the principles behind piezoelectricity and these kind of ultrasonic transducers - I assume you know a bit of background since you're reading this.
I'm using a 28kHz, 70W bolt-clamped Langevin transducer (part number SMBLTD45F28H) which was bough from Steiner & Martin (http://www.steminc.com/) a few years ago for around $30-$40. For photos of it please scroll down or see their website. These are typically intended for ultrasonic cleaning, sonochemistry, low-power welding etc. On the surplus market, they can sometimes be found inside cleaning tanks.
Driving requirements - measuring impedance spectra
Read More...
http://www.imajeenyus.com/electronics/20110514_power_ultrasonic_driver/index.shtml
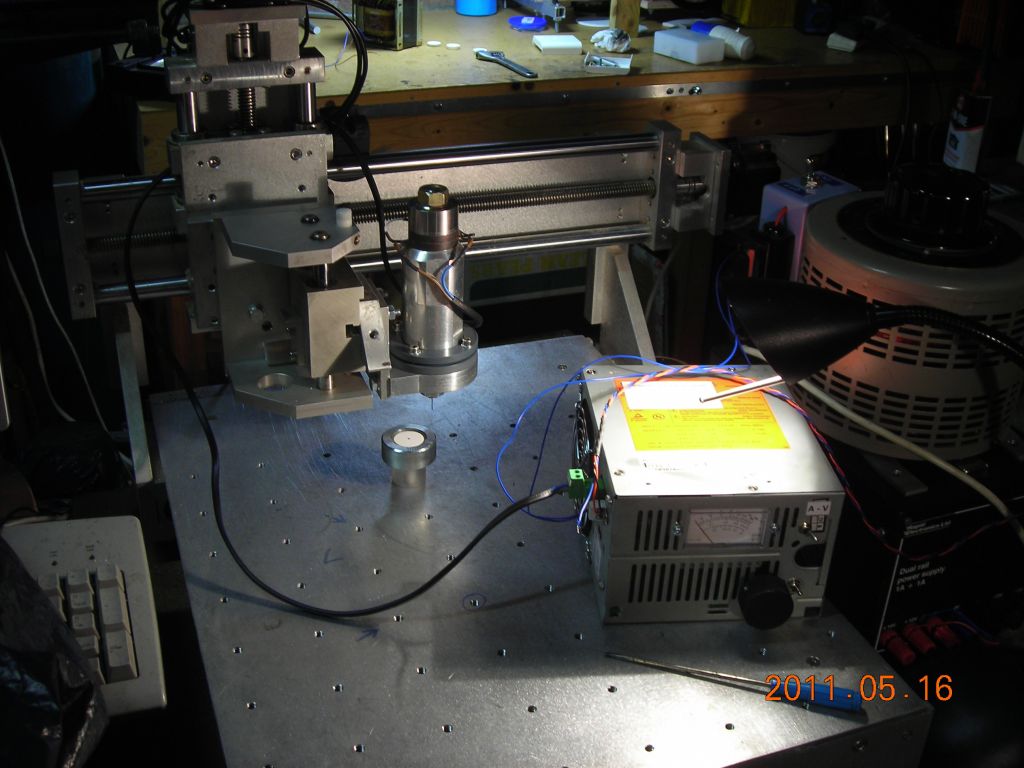
Ultrasonic drilling (16/05/11)
While I was making my second Panaplex display, I realised that an ideal means of forming cathode wire supports would be a piece of ceramic or glass with small holes drilled in it to hold the wires. The holes need to be sub-mm, and this is nearly impossible to do with conventional rotary diamond drills. Fortunately, there is a solution - ultrasonic drilling. This is widely used in lapidary for drilling small holes in stones, beads etc. for threading on to necklaces. As always, commercial setups are very expensive (around $3000), so I decided to have a bash at making my own, having already built a power ultrasonic driver.
The principle is very simple. An ultrasonic horn is used to vibrate a drillbit vertically. The drillbit can consist of nothing more than a piece of wire - I used standard household pins, which are steel and are around 0.7mm diameter. In the presence of an abrasive slurry, the pounding action of the drillbit tip causes the underlying material to chip away, gradually drilling a hole. It works best on brittle materials like glass and ceramics.
The photos show the setup I came up with.Read More...
http://www.imajeenyus.com/workshop/20110516_ultrasonic_drilling/index.shtml
Second Panaplex display (15/11/10)
Introduction
After I'd built my first Panaplex display, I came across a beautiful example of a miniature commercial display which was used in desktop calculators. It's the Elfin Rodan MG-17, with a "D" or "G" suffix depending on the anode construction. The MG-17D has a wire mesh anode in front of the cathodes, like the vast majority of other Nixie and Panaplex displays. This is alright, but it is visible and tends to obscure the cathodes. However, the MG-17G has a sheet metal anode with apertures cut out which correspond to each cathode segment. The glow around the cathode is then confined to the opening in the plate. This construction looks much nicer (and is a bit easier to make) so I decided to go with it.
The three pages linked below have some great photos of both devices in operation. These are backup copies hosted on this site, with links to the original page source. (If you need to see the Japanese characters correctly, use the Shift_JIS encoding.)
- MG-17D - Japanese page with photos of all numbers. This version has a mesh grid.
- MG-17G - Japanese page with photos of all numbers. This version does not have a mesh anode.
- MG-17G - Page from Dieter's tube archive with info on pinout and specifications
If you look closely at the MG-17G, you should be able to make out the construction. The cathodes are bent pieces of wire in the shape of staples, held in a ceramic or glass backplate. The lead-in wires are welded to the cathode wires behind the backplate and the anode is riveted to the front of the backplate. This is the structure I'm going to try and replicate.
A CAD drawing of the display is available here as a Rhino 3D file (version 4 of Rhino) or here as a PDF (scale 8:1).
Backplate
Read More...http://www.imajeenyus.com/vacuum/20101115_second_panaplex/index.shtml
- Power ultrasonic driver to do Ultrasonic drilling for Panaplex Displays
- Powering an Ultrasonic Transducer - Hack a Day
- Power ultrasonic driver
- STEMINC PIEZO
- Ultrasonic drilling
- DSCN4116.JPG (JPEG Image, 1024x768 pixels)
- Second Panaplex display
- Panaplex display counting - YouTube
- Ultrasonic cavitation in lemonade - YouTube
- Tuning ultrasonic driver - YouTube
- Ultrasonic cavitation in water - YouTube
- Welcome to Imajeenyus
- ƒjƒLƒV[ŠÇAB-5870S
- MG-17G (Elfin Rodan) Nixie Röhre- Nixie Tube
I could spend days reading on this site!:) There's a bunch of interesting Projects and Home Made Tools.
Don
Check out the News page, or try one of the categories below:
Electronics Induction heating, power supplies, high voltage, making PCBs
Vacuum Low-pressure discharges, vacuum coating, pumps, hardware
Optical Homebuilt CO2 lasers, fluorescent things
Mechanical Steam engines, Stirling engines, assorted contraptions
Workshop Machines, hand tools, techniques
Mathematics Maths-related stuff
Chemistry Chemical stuff
Computer Computer and software stuff
Page last updated: 19/01/2012, 02:58:22 PM GMT
All content © Lindsay R. Wilson 2010 lindsay@imajeenyus.com
For trouble-free viewing, please ensure you are using the UTF-8 character encoding.



























{kind=link}